

-
- 公司:
- 深圳基准机器人设计公司
-
- 联系:
- 龚玟宾
-
- 邮箱:
- bmid@benchmark-id.com
-
- 手机:
-
13807495700
13808412765
-
- 电话:
-
0755-23761048
-
- 地址:
- 深圳市南山区前海月亮湾大道2076号中国高科大厦D栋7楼
-
- 微信:
-



- 新手设计师经常会犯的三个产品设计错误?1174阅读 2022-11-08 10:20:20
- 产品外观设计全过程中的难题982阅读 2022-11-08 10:18:51
- 产品外观设计过程中会出现什么问题1038阅读 2022-11-08 10:16:45
- 机械设备外观设计和艺术设计之间的对比1068阅读 2022-11-08 10:14:26
- 产品外观设计基础规定详细介绍1323阅读 2022-11-08 10:13:09

深圳机器人结构设计咨询,消费者满意的产品
2024-05-09 01:27:01 1136次浏览
价 格:面议
工业机器人通常由执行机构、驱动-传动系统、控制系统及智能系统部分组成。
执行机构:是机器人赖以完成各种作业的主体部分。通常为开式空间连杆机构。
驱动-传动机构:由驱动器和传动机构组成。传动有机械式、电气式、液压式、气动式和复合式等。而驱动器有步进电机、伺服电机、液压马达和液压缸等。
控制系统:一般由示教操作盘或控制计算机和伺服控制装置组成。前者作用是发出指令协调各有关驱动器之间的运动,同时要完成编程、示教/再现以及和其它环境状况(传感器信号)、工艺要求。外部相关设备之间的信息传递和协调工作。而后者是控制各关节驱动器使各杆能按预定运动规律运动。
智能系统:则由感知系统和分析决策系统组成,它分别由传感器及软件来实现。
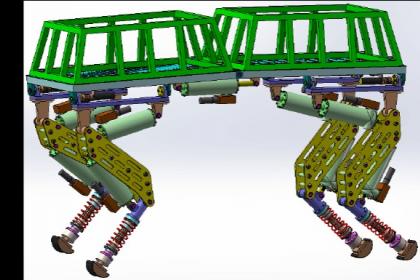
工业机器人的机械结构部分称为操作机。它由机座、腰部、大臂、小臂、腕部及手部组成。即由手臂机构和手腕机构组成。手臂机构一般为2~3个自由度,要求可实现回转、仰俯、升降或伸缩三种运动形式。手臂机构设计时,先要确定其结构型式和尺寸,还需考虑各种构件的重量对其运动速度、精度及刚度的影响。
基准服务机器人设计团队在工业设计上的研究,涉及外观设计、人机交互、色彩应用等。例如老人护理型机器人的应用,因老年人的活动机能降低,需要借助于护理机器人延展其人体功能,能自助参与一些有限的社会活动,能借助机器人进行保健康复,不仅能提高老人的生活质量,同时也能降低家人与护理人员的工作量。
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的度。
-
 工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。18-09-17 20:20:27
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。18-09-17 20:20:27 -
 好的形式和高技术产品的产品比竞争公司更突出。今天的社会中,消费者自己的理解情况,产品不仅可以利用不理解。他们所寻找的东西反映了自己的价值观,是一种完全的产品,资质是丰富自己的生活。姿势和技术是我们的产品,为了评价不可缺少的必要条件。基于形式21-10-20 18:27:01
好的形式和高技术产品的产品比竞争公司更突出。今天的社会中,消费者自己的理解情况,产品不仅可以利用不理解。他们所寻找的东西反映了自己的价值观,是一种完全的产品,资质是丰富自己的生活。姿势和技术是我们的产品,为了评价不可缺少的必要条件。基于形式21-10-20 18:27:01 -
 对很多机器人企业而言,都希望产品设计的外观要有独特性,又要别具一格的魅力,能吸引住用户。不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,21-11-29 10:48:01
对很多机器人企业而言,都希望产品设计的外观要有独特性,又要别具一格的魅力,能吸引住用户。不管是商用类、家用类、还是教育陪伴类机器人,没有办法用一种设计方案去应对所有的使用场景。特别是针对复杂的机器人外观设计,有时候为了能够展现机器人的性能,21-11-29 10:48:01 -
 智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 09:36:01
智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 09:36:01 -
 从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-10-13 17:39:02
从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-10-13 17:39:02 -
 (工业)设计旨在引导创新、促发商业成功及提供更好质量的生活,是一种将策略性解决问题的过程应用于产品、系统、服务及体验的设计活动。它是一种跨学科的专业,将创新、技术、商业、研究及消费者紧密联系在一起,共同进行创造性活动、并将需解决的问题、提出18-10-20 13:03:39
(工业)设计旨在引导创新、促发商业成功及提供更好质量的生活,是一种将策略性解决问题的过程应用于产品、系统、服务及体验的设计活动。它是一种跨学科的专业,将创新、技术、商业、研究及消费者紧密联系在一起,共同进行创造性活动、并将需解决的问题、提出18-10-20 13:03:39 -
 数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 12:00:02
数据显示,目前,世界上至少有48个国家在发展机器人,其中25个国家已涉足服务型机器人开发。在日本、北美和欧洲,迄今已有7种类型计40余款服务型机器人进入实验和半商业化应用。近年来,全球服务机器人市场保持较快的增长速度,根据国际机器人联盟的数19-07-09 12:00:02 -
 从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-10-18 19:12:01
从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两21-10-18 19:12:01 -
 ①轻量化 对机器人来说,电机的尺寸和重量非常敏感,通过高磁性材料优化、一体化优化设计、加工装配工艺优化等技术的研究,提高伺服电机的效率,减小电机空间尺寸和降低电机重量,是机器人电机的关键技术之一。 [5] ②高速 在减速比不能较大调整的情况21-10-26 10:21:01
①轻量化 对机器人来说,电机的尺寸和重量非常敏感,通过高磁性材料优化、一体化优化设计、加工装配工艺优化等技术的研究,提高伺服电机的效率,减小电机空间尺寸和降低电机重量,是机器人电机的关键技术之一。 [5] ②高速 在减速比不能较大调整的情况21-10-26 10:21:01 -
 产品的设计是而实际呈现的体型展示。为了向客户展示产品的主要种类,我们需要引用各种各样的技术内容和艺术创意,根据功能和产品的审美规则进行革新。设计的独立性是强有力的,艺术的美丽的光滑,以及美丽的价值的保证融合到艺术爱好者的生活。“美”的设计,21-10-20 17:03:01
产品的设计是而实际呈现的体型展示。为了向客户展示产品的主要种类,我们需要引用各种各样的技术内容和艺术创意,根据功能和产品的审美规则进行革新。设计的独立性是强有力的,艺术的美丽的光滑,以及美丽的价值的保证融合到艺术爱好者的生活。“美”的设计,21-10-20 17:03:01 -
 工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。机器人感知系统把机器人各种内部状态信息和环境21-10-18 18:15:01
工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。机器人感知系统把机器人各种内部状态信息和环境21-10-18 18:15:01 -
 坐标机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。坐标机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生21-10-26 09:21:01
坐标机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。坐标机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生21-10-26 09:21:01 -
 用工业设计掌握消费者的心,不讲什么大道理,而是直接诉诸消费者的心,若能诉诸消费者的心就能构思艺术化、人性化、科学化的产品。才更有魅力,更为消费者所接受。好的工业设计会说话,不必做过多的宣扬。很多企业对儿童机器人的外观设计也颇为讲究,因为在儿21-11-29 08:51:01
用工业设计掌握消费者的心,不讲什么大道理,而是直接诉诸消费者的心,若能诉诸消费者的心就能构思艺术化、人性化、科学化的产品。才更有魅力,更为消费者所接受。好的工业设计会说话,不必做过多的宣扬。很多企业对儿童机器人的外观设计也颇为讲究,因为在儿21-11-29 08:51:01 -
 我国在服务机器人领域的研发与日本、美国等国家相比起步较晚。在国家863计划的支持下,我国在服务机器人研究和产品研发方面已开展了大量工作,并取得了一定的成绩,如哈尔滨工业大学研制的导游机器人、迎宾机器人、清扫机器人等;华南理工大学研制的机器人19-07-09 17:50:01
我国在服务机器人领域的研发与日本、美国等国家相比起步较晚。在国家863计划的支持下,我国在服务机器人研究和产品研发方面已开展了大量工作,并取得了一定的成绩,如哈尔滨工业大学研制的导游机器人、迎宾机器人、清扫机器人等;华南理工大学研制的机器人19-07-09 17:50:01 -
 产品的实用性、美和环境是工业设计研究的主要内容。工业设计从一开始,就强调技术与艺术相结合,所以它是现代科学技术与现代文化艺术融合的产物。它不仅研究产品的形态美学问题,而且研究产品的实用性能和产品所引起的环境效应,使它们得到协调和统一,更18-09-17 20:32:02
产品的实用性、美和环境是工业设计研究的主要内容。工业设计从一开始,就强调技术与艺术相结合,所以它是现代科学技术与现代文化艺术融合的产物。它不仅研究产品的形态美学问题,而且研究产品的实用性能和产品所引起的环境效应,使它们得到协调和统一,更18-09-17 20:32:02 -
 工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。自由度是指机器人所21-10-20 18:45:01
工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。自由度是指机器人所21-10-20 18:45:01 -
 智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 09:51:01
智能化、仿生化是工业机器人的阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。伴随移动互联网、物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服21-10-26 09:51:01 -
餐厅机器人工业设计,智能送餐机器人外观设计 ¥10000机器人设计的成果最终要落实在生产上,工艺选择与成本控制是落地关键环节。 基准机器人设计团队在后期生产的研究上,主要注重于工艺、成本控制、质量监控上。例如服务机器人的外壳覆盖件的后期工艺,在给长沙地区的客户选择供应商时,因湖南机器人模具15-10-24 17:16:17
-
 技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。家用机器人的总销售量预计将超过30万台21-10-26 09:57:01
技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。家用机器人的总销售量预计将超过30万台21-10-26 09:57:01 -
 这也很考验设计师的能力,“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人21-11-06 10:27:01
这也很考验设计师的能力,“很多机器人企业抛出很多概念性的东西,然后设计师需要去寻找大量的素材,又要贴合客户的要求,把外观设计具体化,这很考验设计师的能力。”现在虽然还没有一个严格而准确的机器人定义,但是我们希望对机器人的本质做些把握:机器人21-11-06 10:27:01
被浏览过 4923752 次 版权所有:深圳基准机器人设计公司(ID:11429746) 技术支持:胡俊芝
第9年

